
Jun-2021
A smart approach to tank dewatering
A tank dewatering technology using smart sensors is designed to reduce hydrocarbon losses and raise the quality of crude supplies to the refinery without process interruption.
FAWAZ AL SAHAN, OMAR AL ZAYED and FAWAZ AL HADLAQ
Saudi Aramco
Viewed : 7252
Article Summary
Hydrocarbon tank dewatering is a crucial process in the oil and gas industry. It impacts safety, the environment, health, hydrocarbon losses, and crude quality. Improper tank dewatering can result in incidents, process interruption, tank corrosion, and customer claims. Traditionally, there have been two types of dewatering solutions: manual and automatic. Common automatic dewatering solutions include internally mounted microwave and capacitance sensors and externally mounted drain valves, microwave and capacitance sensors on the drain pipes.
For the first time in the oil and gas industry, three disruptive solutions for hydrocarbon tank dewatering have been deployed: a sound velocity dewatering system, internally mounted interface sensors, and a combination of the two — smart dewatering.
Sound velocity dewatering system
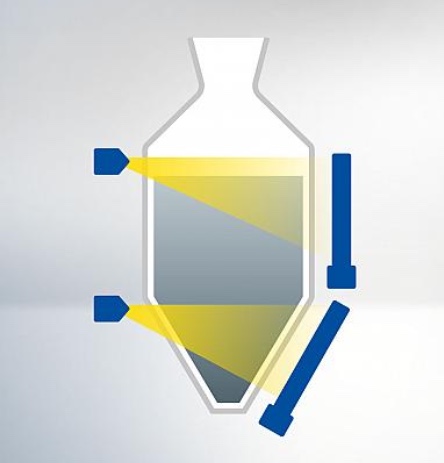
A sound velocity dewatering system utilises a non-intrusive smart sensor, control system, and drain control valve. The non-intrusive sensor has two transducers, which transmit and receive sound waves and recognise the media type based on its unique measured sound velocity (see Figure 1).
The sound velocity dewatering system was initially tested on crude tanks since crude has a smaller difference in sound velocity than refined products like diesel and naphtha when compared to water. Figure 2 shows how a sound velocity sensor can recognise the difference between crude (with sound velocity around 1510 m/s) and water (with sound velocity around 1260 m/s).
There are a number of requirements for the successful set-up of a sound velocity dewatering system. The sound velocity sensor requires correction against the fluid’s operating temperature as sound velocity is temperature dependent. The sensor’s location on the drain pipe should be correctly selected as the location will always be full of fluid with a certain maximum velocity, to avoid vortices inside the tank and to prevent bubble formation in the drain pipe. If the current piping does not help in achieving that, some minor modifications to the drain pipe will be helpful, such as adding an elbow, a reducer with a smaller pipe size, or adding a manual valve downstream of the sensors which can be partially closed.
The process parameters flow and sound velocity should be displayed remotely at the control system in order to recognise the drained media and calculate its volume, and also to enable the detection of the drain control valve’s condition (stuck, passing, or healthy). A sound velocity value should be estimated for the drained water and for the hydrocarbon at operating temperature. This can be found in the literature or calculated by software.
After installation of the system, field testing should be conducted during commissioning to ensure that the sound velocity sensor data is healthy (signal strength, signal/noise ratio, no loss of signals). In addition, testing will enable selection of the best cut-off point for the valve to start closing at the end of every drainage cycle.
During commissioning, one must cross-check the drained media (water, hydrocarbon, or a mixture/emulsion) by hydrocarbon detection paste throughout the test. This is to confirm that the sound velocity sensor reading matches the media inside the drain pipe.
A sound velocity dewatering system can be operated manually by opening the drain control valve to trigger the drainage cycle, or automatically based on a timer. The time is based on historical data of how much and how often water accumulates inside the hydrocarbon tank. The sequence of operation of a sound velocity dewatering system is:
1. Flush the drain pipe for, say, 30 seconds to ensure that there is no trapped hydrocarbon in the drain pipe.
2. Sound velocity measurement starts as water starts to be drained from the tank.
3. If the sound velocity value drops to a preset value (1400 m/s, for example), the valve will close automatically as the sensor starts to detect traces of hydrocarbon in the drain pipe.
4 In case of failure of the sound velocity sensor, the transmitter, or the signal during the drainage cycle, an alarm is initiated and the drain valve will automatically close.
5. If the dewatering cycle exceeds the expected pre-set duration (20 minutes as an example, determined during commissioning), an alarm is initiated and the drain control valve will automatically close.
6. If the drain control valve is stuck or internally leaking (passing) after receiving a command to close, an alarm is initiated for operations personnel to plan a corrective action.
Figure 3 shows the sound velocity dewatering system in operation.
Figure 4 shows the first sound velocity dewatering system, installed for a crude tank at Saudi Aramco Riyadh refinery.
Internally mounted interface sensors
The sound velocity dewatering system has one limitation whereby at the end of every dewatering cycle some hydrocarbon will be trapped along with water inside the drain pipe. Before the start of the next drainage cycle, this trapped hydrocarbon should be drained before water starts to flow in the drain pipe. To overcome this issue, the addition of an internally mounted sensor was explored.
There are various types of internally mounted interface sensors. The best options include pressure sensors, sound velocity sensors, or guided wave radar (GWR). All of these can be installed inside a hydrocarbon tank and enable direct measurement of the water interface level.
GWR has many advantages as it indicates both the total and interface level, but this technology cannot measure the water interface if the tank height exceeds a certain limit (10m normally) as the GWR signal energy will be lost once it reaches the water level. To overcome this limitation, side-mounting is a solution, but this requires the tank to be empty for it to be installed. A 4in nozzle with a purge mechanism will also be required (see Figure 5).
Another promising internally mounted solution is pressure sensors which can be top or side mounted and can measure pressure, differential pressure, water interface level, total hydrocarbon level, and fluid temperature (see Figure 6). This solution also has the capability to measure fluid density. The system utilises a pair of smart pressure sensors. Both sensors are of different lengths and are installed from the top. One is immersed so that it is close to the tank bottom where water is present, and the other sensor is inserted in the hydrocarbon (above the maximum expected water level).
The internally mounted pressure sensors system was installed at Saudi Aramco Riyadh refinery for testing. Manual gauging was used to measure the actual water interface level inside the tank and to compare againt the smart sensors’ readings. Data was collected during different days and times and revealed matching readings. Table 1 shows some of the data collected and the difference between the manual gauging and the internally mounted pressure sensor readings. Figure 7 shows continuous measurement of the water interface level inside the same tank at Saudi Aramco Riyadh refinery.
Internally mounted pressure sensors deliver numerous advantages. One set of smart sensors provides six measurements: pressure, differential pressure, total level, water interface level, temperature measurement, and tank overfill protection. They provide a redundant or alternative level measurement for crude tanks in addition to the existing tank gauging instrument. The sensors can be flush mounted with a self-cleaning diaphragm and are small in size (1in threaded connection). The sensors are easy to install, maintain, and replace while the tank is in operation and provide a cost effective solution for measuring water interface inside hydrocarbon tanks.
Add your rating:
Current Rating: 4






-
 Ball & Gate Valve Replacement
Ball & Gate Valve Replacement
-
 Axens Plastic Recycling Solutions
Axens Plastic Recycling Solutions
-
 Essential articles from W R Grace
Essential articles from W R Grace
-
 Level and density in FCC processes from Berthold
Level and density in FCC processes from Berthold
-
 Smart solutions for valve automation and valves from Valmet
Smart solutions for valve automation and valves from Valmet
-
 Thermal systems to optimize your refinery
Thermal systems to optimize your refinery
-
 Honeywell UOP Inspires change for a better tomorrow
Honeywell UOP Inspires change for a better tomorrow
-
 Atlas Copco Expander Compressors
Atlas Copco Expander Compressors
-
 Europe's largest manufacturer of tower packings
Europe's largest manufacturer of tower packings
-
 Deliver and scale use cases with Cognite AI
Deliver and scale use cases with Cognite AI
SPONSORS